Abstract
This article reviews advancements in understanding the dynamic behavior and control strategies of pneumatic linear actuators (PLAs), emphasizing nonlinear dynamics, hysteresis effects, and energy-efficient design. Key innovations include friction compensation models, hybrid control algorithms, and compliance with ISO/GB standards for industrial applications.
1. Nonlinear Dynamics and Hysteresis Behavior
Pneumatic linear actuators exhibit inherent nonlinearities due to compressible airflow, friction, and hysteresis losses. Experimental studies demonstrate that force-displacement relationships require dynamic models incorporating velocity-dependent friction and pressure hysteresis. For instance, hysteresis loops observed during cyclic loading-unloading tests reveal energy dissipation patterns critical for predicting actuator performance under variable loads.
2. Mechanical Design and Operational Principles
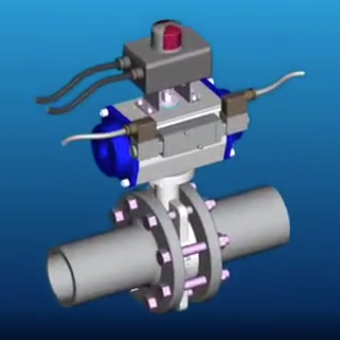
PLAs convert compressed air energy into linear motion via pistons or diaphragms. The spring/diaphragm configuration, widely used in industrial automation, relies on adjustable non-return valves to regulate chamber pressure and optimize force output. Additive manufacturing enables lightweight, customizable designs, such as 3D-printed actuators for precision gripping systems, reducing inertia and improving response times.
3. Control Strategies for Precision Motion
- Hybrid PID-Sliding Mode Control: Combines traditional PID with sliding mode algorithms to mitigate disturbances and nonlinear friction, achieving sub-millimeter positioning accuracy.
- Open-Loop Constant Velocity Mode: Experimental setups validate reciprocating motion with minimal velocity fluctuations using pulsewidth modulation (PWM) for solenoid valve control.
4. Performance Standards and Validation
Compliance with ISO 5211 and GB/T 12222 ensures structural integrity and operational reliability. Key criteria include:
- Leakage Limits: Air leakage ≤ (3 + 0.15D) cm³/min under 0.6 MPa pressure.
-
Output Force Consistency: Actuators must maintain ≥90% of rated force during cyclic loading.
Benchmark tests highlight the importance of dynamic friction compensation to avoid motion lag or overshoot.
Conclusion
Recent progress in dynamic modeling (e.g., hysteresis-aware frameworks1) and adaptive control algorithms (e.g., hybrid PID-SMC6) has enhanced the precision and energy efficiency of pneumatic linear actuators. Future research should focus on integrating IoT-enabled sensors for real-time health monitoring and predictive maintenance.
If you want to learn more about low-priced products, please visit the following website: www.xm-valveactuator.com